genre:
Action-Adventure / Racing
engine:
Unity
team size:
5
duration:
5 Months
role:
3Cs / Vehicle Design / Programming
‘Hoversword’ is the vertical slice to a 3rd person action adventure about high speeds, futuristic boardsports, and an underground dungeon-delving hoverboard scene.
Below, you can see a playthrough of the prototype.
My main responsibility was to design, implement and polish the character controller. While I had many other tasks throughout the project, I spent the most amount of time on creating the flowy, hovering board controls.
I took a lot of inspiration from downhill longboarding, snowboarding and kitesurfing to get a good mix of breakneck speeds, masterful board control and aerial tricks. To implement board behavior I frequently looked to real world physics of boardsports as well as aviation.
Prototyping
As the game revolves around the hovering character controller, I had to quickly find a working approach to the hover-like movement at it’s core.
With little prior experience in vehicle design I researched how other boardsports games as well as racing games (especially anti-grav) design and implement their movement systems. Using the gathered information as well as my experience with the engine and PhysX, I collected several approaches to prototype and test:
- rolling sphere with interpolated board height to fake hovering
- invisible wheels with suspension
- physical thrusters in different configurations
- custom movement code, moving the root transform manually based on player input
I then evaluated them based on controllability, implementation complexity and how close they could get to my vision of the hoversword in terms of game feel.
First iteration of physical thrusters which stood out as the most fun among the team and testers.
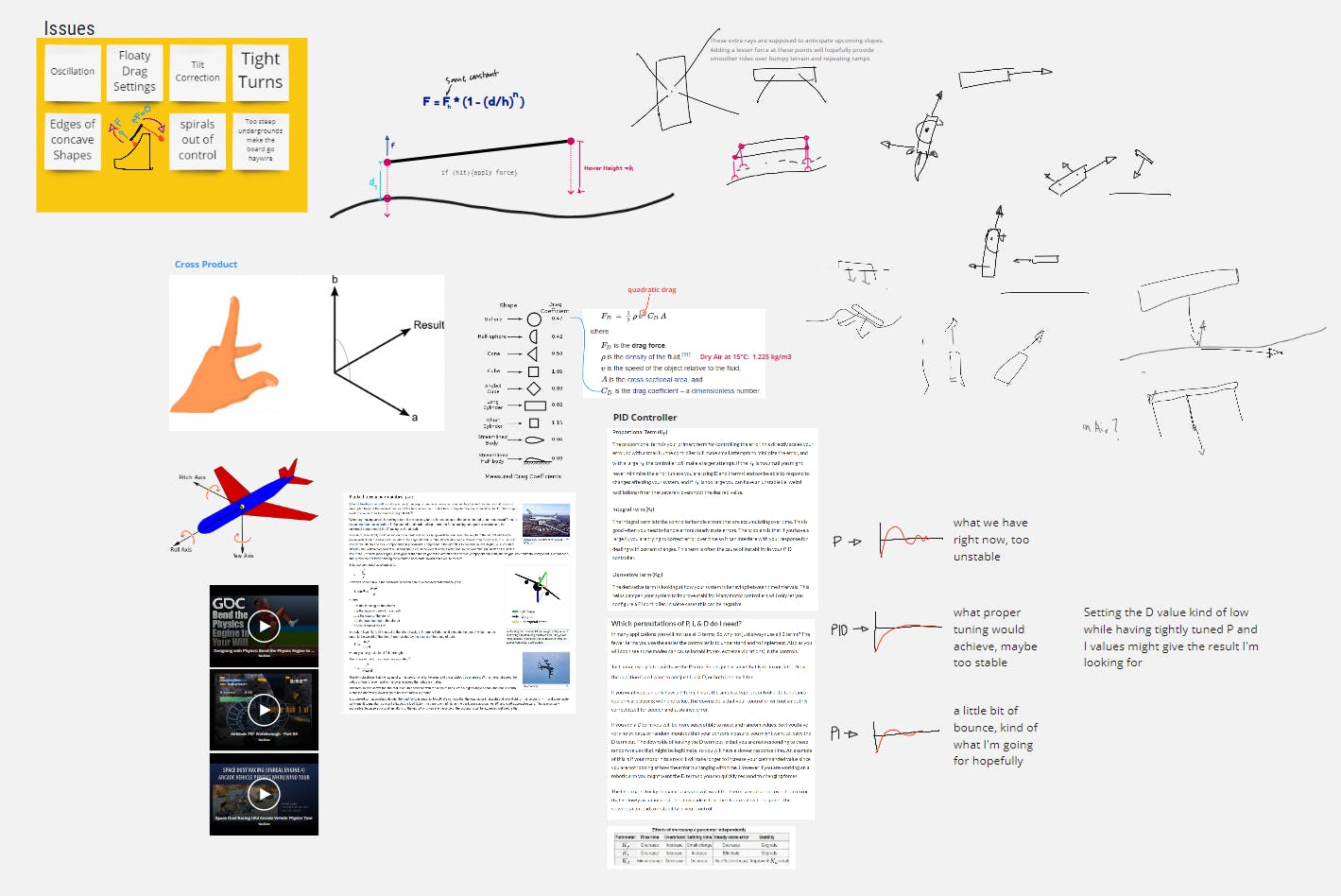
Tuning for Stability
Although it was more complex to implement, I chose to use physics based thrusters for the board. This approach was immediately fun to interact with and showed great potential in terms of game feel.
To get the board to stabilize I looked at physics engine tricks that other games implement as well as real life physics and robotics.
I finally got the board to a reasonably stable state by
- offsetting the center of gravity, massively increasing the pitch/roll stability as well as making the board always return to an upright position
- making use of PID controllers, a massively popular controller type used in robotics. Using a control feedback loop, these controllers can be finetuned to create smooth, predictable motions.
- implementing custom drag functionality to dynamically fine tune handling at specific speeds as well as get accurate information about values such as terminal velocity
- using thrusters to tilt/roll the board to steer instead of changing yaw angle directly. This helps cornering stability as well as traction and makes the steering feel much more responsive.
2 Semesters of engineering were good for something after all
For this iteration, I focused on balancing controllability with sense of speed and getting the steering to feel more ‘surfey’.
Here, I made the controls work properly with the levels and surfaces the level designer had created. Sadly, some hover-like feel was lost in this iteration.
Tuning for Fun
While working with the level designer to create good pacing, interesting obstacles and a game world that would be fun to move through, I constantly tweaked the variables of the controller to uphold the game feel I envisioned.
My goal was to create a movement that feels like hovering in mid air while keeping controls tight and responsive as well as enabling twitch input-corrections at high speeds.
Having learned from all prior iterations, for the final movement tuning I
- purposefully used conventionally undesirable PID tuning values to create a more elastic, hover-like handling.
- introduced additional sensors around the board to assist the player ride smooth lines through our levels
- disabled certain assists when airborne to allow for more player expression as well as aerobatic maneuvers such as loops
- implemented animations from our animator and added an extensive IK system on top to give feedback to user input and player state
- worked with the VFX Artist to create particle effects that increase the feeling of power and speed
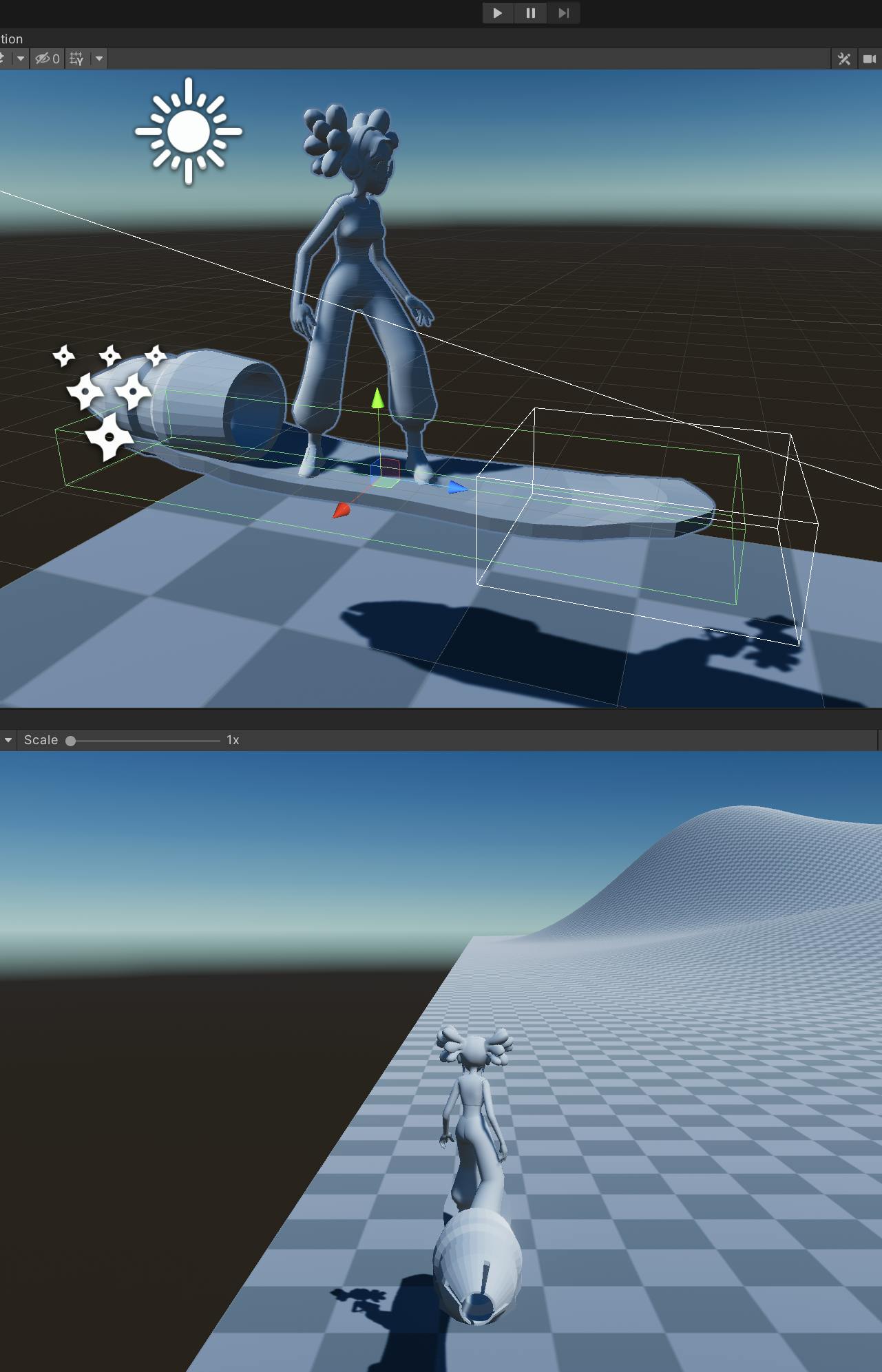
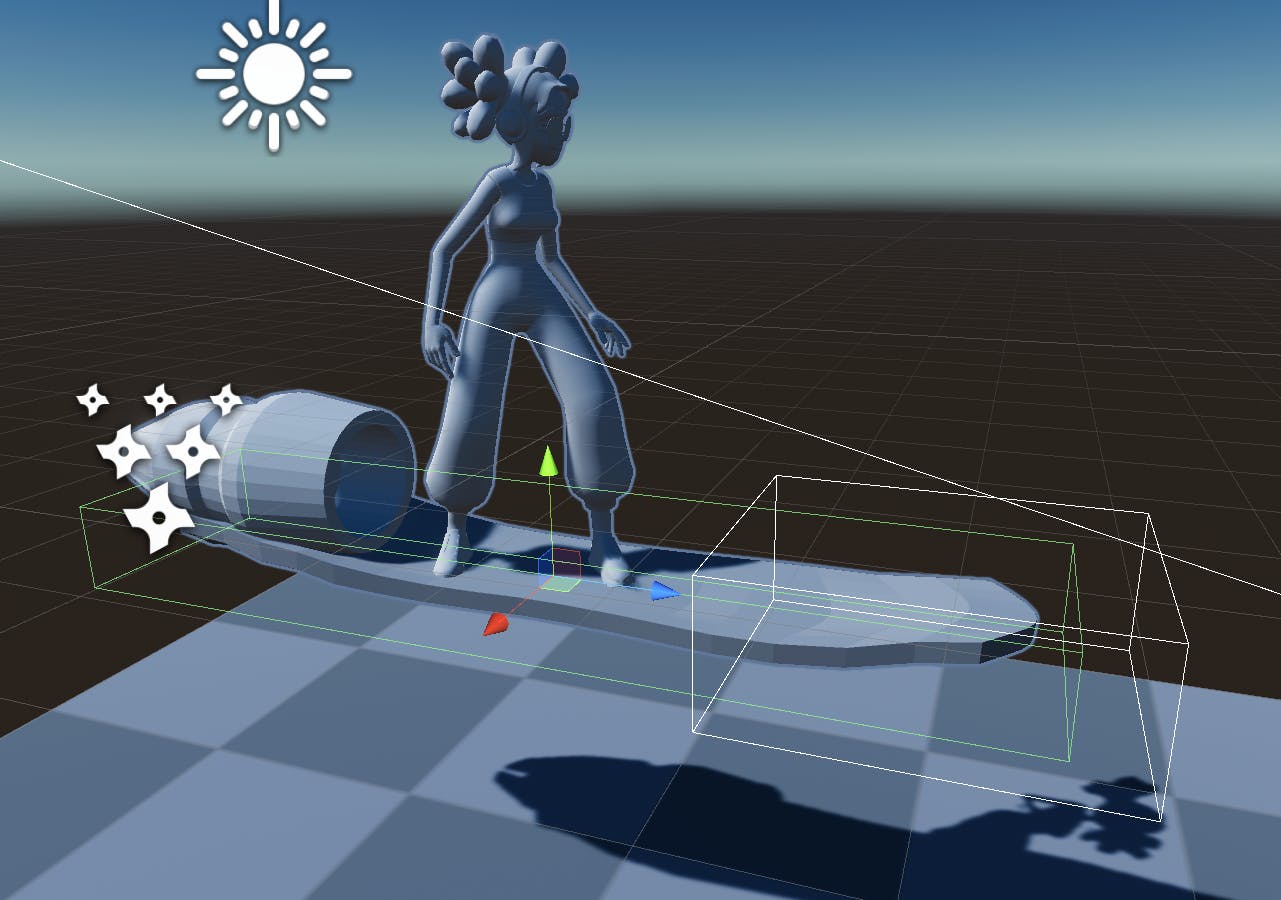
My debugging scene with the most important debugging gizmos enabled. Among others you can see color-indicators of how much force is being applied, the dynamic camera-target, and the IK-Rig.
Gallery